The ClairLup inductive loop detectors employ a high-performance processor, stable and reliable circuit design, and advanced detection algorithms specially optimized for real-time detection, interference resistance, deadlock prevention, environmental status monitoring, and handling of abnormal conditions. This ensures that the detector operates without the need for maintenance over the long term, significantly reducing user operational costs and enhancing the overall value of user systems. The ClairLup inductive loop detectors find wide applications in traffic enforcement, weighing, toll booth, and other systems for urban roads, highways, bridges, tunnels, and similar road segments.
Response time <10ms
The response time of ClairLup inductive loop detectors is less than 10ms, whereas similar products in the market typically have response times ranges from 24ms to 100ms. This implies that ClairLup offers superior accuracy compared to the market's standard products and support reliable detection for higher vehicle speeds.
For example: Average car length: 4m, 4m/100ms=144km/h, means while the response time is 100ms, it will not be able to detect a 4m (13 feet) car to pass it with a speed higher than 144km/h (89m/h).
TraffiClair
Response Time
Others
ClairLup-V1
10ms
Ranges from 24ms to 100ms.
ClairLup-V2
10ms
ClairLup-V4
8ms
ClairLup-V6
10ms
ClairLup-V8
5ms
ClairLup-V4F
3ms
ClairLup-V8F
3ms
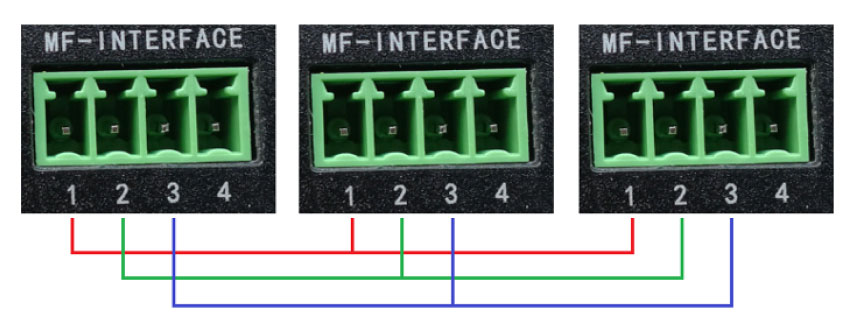
Interference resistance
Polling mode within one device avoiding interference.
When multiple devices are cascaded, the loops of different devices can effectively avoid interference.
Supports close placement of loops, with a loop-to-loop distance of less than 10cm.
Anti-lock algorithms
Utilizes advanced intelligent anti-lock algorithms to ensure long-term, maintenance-free operation. No need to set a holding time at all.
The determination is made based on the vehicle's deviation over a period of time and whether there are other vehicles entering.
Advanced detection algorithms
High Ground Clearance
Supports reliable detection o flarge vehicles. trailers, and high-ground-clearance vehicles.
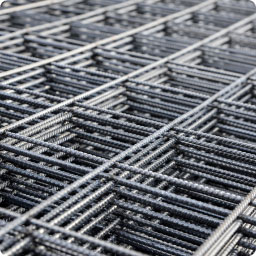
Reinforcing Steel Mesh
Addressed the challenge of detecting on steel-reinforced road surfaces
Crossing Lanes
Resolved the issue of interference between adjacent loops. allowing for close loop placement.
Fast fundamental frequency refresh
Temperature-Dependent Inductance
The inductance of a loop typically changes with temperature. As temperature increases. the inductance decreases. This means that the loop's resonant frequency also changes accordingly.
Frequency Drift
Due to the temperature dependence of inductance. the reference frequency of the loop experiences frequency drift. which may lead to the loop no longer resonating at the desired frequency.
Environmental Temperature Instability
Environmental temperatures are not always stable, especially in outdoor or extreme conditions. Rapid temperature changes can lead to more significant frequency drift in the loop.
Capture rate >99.9%
ClairLup Loop Detectors
ClairLup-V1
ClairLup-V2
ClairLup-V4
ClairLup-V6
ClairLup-V8
1-channel detector
Presence detection
2-channel detector
Presence & direction detection
4-channel detector
Presence & direction detection
6-channel detector
Presence & direction detection
8-channel detector
Presence detection
ClairLup-V4F
ClairLup-V8F
Traffic flow data
Vehicles per Lane, Range: 0 to 65535
Lane Occupancy, Range: 0% to 100%
Average Vehicle Speed, Range: 0 to 255 km/h
Average Inter-Vehicle Gap, Range: 0 to 65535 meters
Average Headway Time, Range: 0 to 65535 seconds
Percentage of Following Vehicles, Range: 0% to 100%







.png)


 Related News
Related News


