The integration of smart algorithms and AI detection is pivotal in creating an intelligent traffic management.
Isolated Intersection Control
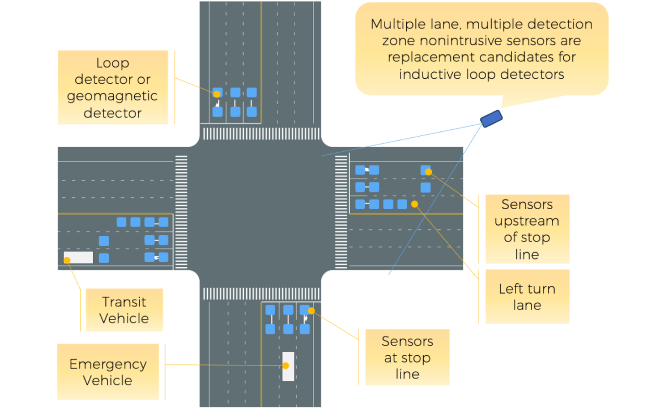
Actuated control utilizes sensors to provide data to an isolated local traffic signal controller. Sensors are typically located at stop lines, upstream of the stop line, left turn lanes, and at positions to detect emergency and transit vehicles. Inductive loop detectors are the most common sensor used for this application, although multiple-lane, multiple detection zone sensors such as the video image processor or true presence microwave radar may have merit for this type of signal control.
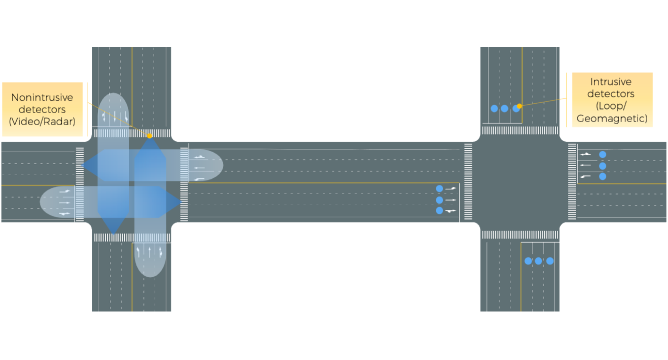
By installing detectors(intrusive/nonintrusive) at connected intersections in a region, real-time traffic data help to create an optimized traffic plan, adjusting parameters such as cycle, split, offset, coordinate key road segments in the area to reduce travel time and stop frequency. Aiming to achieve the best overall control effect for the region.
SCOOT continuously measures traffic demand on most approaches to intersections in the network and optimizes signal cycle lengths, splits, and offsets to minimize delay and stops. SCOOT sensors are located upstream from the signal stop line, approximately 15 meters downstream of the adjacent upstream intersection.
Similar to SCOOT, SCATS adjusts cycle time, splits, and offsets in response to real-time traffic demand and system capacity. The principal goal of SCATS is to minimize overall stops and delay when traffic demand is less than system capacity. SCATS sensors are installed in each lane immediately in advance of the stop line to collect volume and occupancy data during the green of the approach.
ACS Adaptive control systems such as RHODES adopt upstream and downstream sensors, 2 per lane link. A traffic adaptive system for this purpose is defined as one in which all signal timings are evaluated and changed based on forecasts of future traffic flow continuously in real time. Traffic adaptive systems are frequently distributed systems with the algorithms running in individual controllers and the controllers negotiating with each other over the settings.
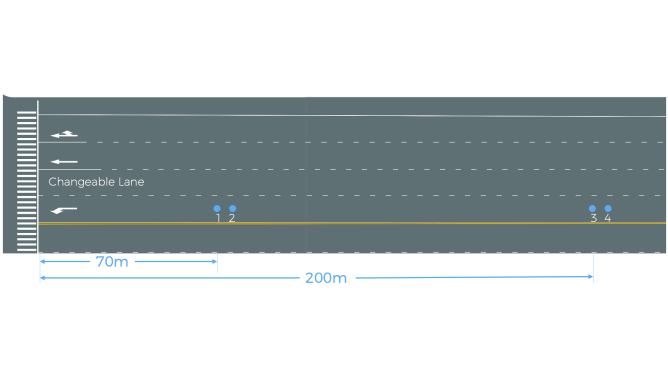
Changeable lanes change their indicated direction based on traffic flow characteristics. When vehicles reach the position of the second set of detectors (3&4), the changeable lane transitions to a left-turn configuration. The changeable lane returns to a straight-through configuration when vehicles disperse and no longer trigger the first set of detectors (1&2). Improving left-turn lane efficiency by 10-30% to alleviate traffic congestion and reduce queue lengths at intersections.
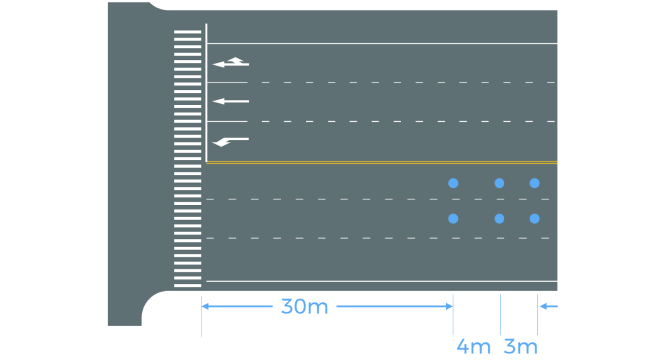
Spillback control involves placing detection points on lanes a certain distance from the exit direction at the current intersection. Detect and trigger spillback control whenever a queue overflow occurs, preventing deadlock situations at the current intersection. This ensures maximum utilization of road resources while promptly addressing overflow incidents.

.png)
.png)